
Variations of grey values for different x-positions along a line y = const.
Images are 2D functions f(x,y) in spatial coordinates (x,y) in an image plane. Each function describes how colours or grey values (intensities, or brightness) vary in space:
Variations of grey values for different x-positions along a line y = const.
An alternative image representation is based on spatial frequencies of grey value or colour variations over the image plane. This dual representation by a spectrum of different frequency components is completely equivalent to the conventional spatial representation: the direct conversion of a 2D spatial function f(x,y) into the 2D spectrum F(u,v) of spatial frequencies and the reverse conversion of the latter into a spatial representation f(x,y) are lossless, i.e. involve no loss of information. Such spectral representation sometimes simplifies image processing.
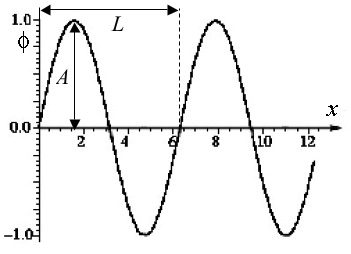
To formally define the term "spatial frequency", let us consider a simple 1D periodic function such as sine function φ(x) = sin x:
| 
|
| Periodic function φ(x) = sin x | General sinusoidal function x |
It consists of a fixed pattern or cycle (from x = 0 to x = 2π ≅ 6.28; in particular, φ(0) = 0.0; φ(π/2) = 1.0; φ(π) = 0.0; φ(3π/2) = −1.0; and φ(2π) = 0.0) that repeats endlessly in both directions. The length of this cycle, L (in the above example L = 2π) is called the period, or cycle of the function, and the frequency of variation is the reciprocal of the period. For the spatial variation where L is measured in distance units, the spatial frequency of the variation is 1/L. Generally, a sinusoidal curve f(x) = A sin(ωx + θ) is similar to the above pure sine but may differ in phase θ, period L = 2π/ω (i.e. angular frequency ω), or / and amplitude A. The sine function has the unit amplitude A = 1, the unit spatial frequency (i.e. the angular frequency ω = 2π), and the zero phase θ = 0.
Images below show what
x-directed sinusoidal variations of grey values in a synthetic greyscale image
f(x,y) = fmean + A sin((2π/N)ux + θ)
look like:
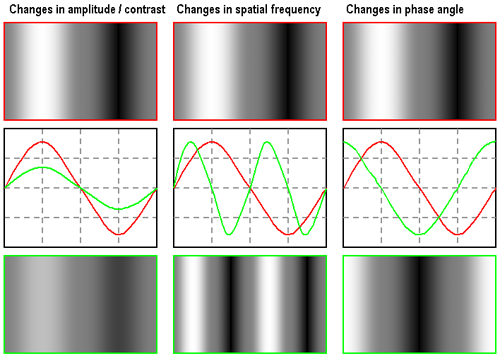
Column1: the bottom image is half the amplitude/contrast
of the top image.
Column 2: the bottom image is twice the spatial frequency of the top image.
Column 3: the bottom image is 90o (θ = π/2) out of phase w.r.t. the top image.
(All the images - from www.luc.edu/faculty/asutter/sinewv2.gif)
Here, u is a dimensionless spatial frequency corresponding to the number of complete cycles of the sinusoid per the image width N measured in the number of pixels. The ratio 2π/N gives the spatial frequency in units of cycles per pixel. To relate the dimensionless spatial frequency parameter u to the number of complete cycles of the sinusoid that fit into the width of the image from the starting pixel position x = 0 to the ending position x = N − 1, the function should be specified as f(x,y) = fmean + A sin((2π/(N−1))ux + θ) so that u corresponds to the number of complete cycles that fit into the width of the image.
A few examples of more general 2D sinusoidal functions (products of x- and y-
oriented sinusoids:
| 
| 
|
| Images from: www.canyonmaterials.com/grate4.html | www.xahlee.org/SpecialPlaneCurves_dir/Sinusoid_dir/sinusoid.html | |
In such artificial images, one can measure spatial frequency by simply counting peaks and thoughs. Most of real images lack any strong periodicity, and Fourier transform is used to obtain and analyse the frequencies.
Return to the local table of contents

The computation of the (usual) Fourier series is based on the integral identities
(see on-line Math Reference Data
for more detail):

| 
|
|
Images from the Math Reference Data http://math-reference.com/s_fourier.html and http://www.brad.ac.uk/acad/lifesci/optometry/resources/modules/stage1//pvp1/CSF.html | |
The Fourier series decomposition equally holds for 2D images, and the basis consists in
this case of 2D sine and cosine functions. A Fourier series representation of a 2D function,
f(x,y), having a period L in both the x and y directions is:


Return to the local table of contents
2D Fourier transform represents an image f(x,y) as the weighted sum of the basis
2D sinusoids
such that the contribution made by any basis function to the image
is determined by projecting f(x,y)
onto that basis function.
In digital image processing, each image
function f(x,y) is defined over discrete instead of continuous domain,
again finite or periodic. The use of sampled 2D images of finite extent
leads to the following discrete Fourier transform (DFT) of an N×N image
is:

due to ejθ ≡ exp(jθ) = cos θ + jsin θ. The (forward) DFT results in a set of complex-valued Fourier coefficients F(u,v) specifying the contribution of the corresponding pair of basis images to a Fourier representation of the image. The term "Fourier transform" is applied either to the process of calculating all the values of F(u,v) or to the values themselves.
The inverse Fourier transform converting a set of Fourier coefficients into an image
is very similar to the forward transform (except of the sign of the exponent):

The forward transform of an N×N image yields an N×N array of Fourier coefficients that completely represent the original image (because the latter is reconstructed from them by the inverse transform). Manipulations with pixel values f(x,y) or Fourier coefficients F(u,v) are called processing in the spatial domain or frequency (spectral) domain, respectively. The transformation from one domain to another via a forward or inverse Fourier transform does not, in itself, cause any information loss.
Return to the local table of contents
Real, R(u,v), and imaginary, I(u,v) parts of the complex number
F(u,v) are not informative in themselves; more important representation is obtained
by representing each complex coefficient F(u,v) with its
magnitude, |F(u,v)|, and phase, φ(u,v):

If an array of complex coefficients is decomposed into an array of magnitudes and an array of phases, the magnitudes correspond to the amplitudes of the basis images in the Fourier representation. The array of magnitudes is called the amplitude spectrum of the image, as well as the array of phases is called the phase spectrum. The power spectrum, or spectral density of an image is the squared amplitude spectrum: P(u,v) = |F(u,v)|2 = R2(u,v) + I2(u,v). All the power, amplitude, and phase spectra can be rendered as images themselves for visualisation and interpretation. While the amplitude spectrum reveals the presence of particular basis images in an image, the phase spectrum encodes their relative shifts. Thus, without phase information, the spatial coherence of the image is destroyed to such extent that it is impossible to recognise depicted objects. Without amplitude information, the relative brightnesses of these objects cannot be restored, although the boundaries between them can be found. Because phase is so important to keep the overall visuall appearance of an image, most of image processing operations in the frequency domain do not alter the phase spectrum and manipulate only the amplitude spectrum.
The basic properties of the DFT of an image are its periodicity and complex conjugate symmetry. The spectrum repeats itself endlessly in both directions with period N, i.e. F(u,v) = F(u + kN, v + lN) where k, l ∈ [−∞, ..., −1, 0, 1, 2,..., ∞]. The N×N block of the Fourier coiefficients F(u,v) computed from an N×N image with the 2D DFT is a single period from this infinite sequence. The second property arises because the image is real-valued whereas the DFT operates on complex numbers. Complex conjugate symmetry means that |F(u,v)| = |F(−u,−v)|, so that there exist negative frequencies which are mirror images of the corresponding positive frequencies as regarding the amplitude spectrum.
Due to periodicity and conjugate symmetry, the computed spectra have one peculiarity:
for the computed values of F(u,v), frequency increases up to u = N/2
and decreases thereafter; the half of the spectrum for which u > N/2 is
a "double reflection" of the half with u ≤ N/2, and the same
applies to frequencies either side of v = N/2, as illustrated below:
A portion of an infinite, periodic spectrum exhibiting
complex conjugate symmetry,
and the sample of the spectrum being computed by the DFT.
The interpretation of spectra is made much easier if the results of the DFT are centred on
the point (u = 0, v = 0), such that frequency increases in any direction away
from the origin. This can be done by circular shifting of the four quadrants of the array or
computing the DFT sums from −N/2 to N/2 rather than from 0 to N.
Alternatively, by the shift theorem of the Fourier transform
(see Wikipedia for a
brief description of the shift theorem), the same result can
be achieved by making the adjacent input values positive and negative by multiplying
f(x,y) by (−1)x+y (i.e. by keeping the input values
positive and negative for even and odd sums x+y, respectively).
Typically, all the spectra are
represented with the centre point as the origin to see and analyse dominant image frequencies.
Because the lower frequency amplitudes mostly dominate over the mid-range
and high-frequency ones, the fine structure of the amplitude spectrum can be perceived only
after a non-linear mapping to the greyscale range [0, 255]. Among a host of possible ways,
commonly used methods include a truncated linear amplitude mapping with the
scale factor λ for the amplitude (the scaled amplitudes λa are
cut out above the level 255; it is a conventional linear mapping if
the maximum amplitude amax ≤ 255/λ) or the like
truncated linear mapping after some continuous
non-linear, e.g. logarithmic amplitude transformation. The examples below
show amplitude spectra of the same image obtained with the linear or truncated linear mapping of
the initial amplitudes and the logarithms of amplitudes:

| 
| 
| 
|
| Original image | Amplitude spectrum: linear scale λ = 3.92 | Truncated linear mapping λ = 15.7 | Truncated linear mapping λ = 250.9 |
| 
| 
| 
|
| Phase spectrum | Log-amplitude spectrum: linear scale λ = 60.9 | Truncated log-linear mapping λ = 243.6 | Truncated log-linear mapping λ = 487.2 |
Spectra of simple periodic patterns, e.g. of pure 2D sinusoidal patterns, are
the simplest possible because correspond to a single basis image:
| 
|
| 2D sinusoid | Amplitude spectrum |
| 
| 
| 
| |
| Circle | Square | |||
| 
| 
| 
| |
| Periodic circles | Periodic squares | |||
Images below demostrate the natural digital photo, its power, amplitude, and phase spectra,
and the images reconstructed with the inverse DFT from the spectrum restricted to only
higher or only lower frequencies ( these images are taken from
www.aitech.ac.jp/~iiyoshi/ugstudy/ugst.html):

| 
| 
|
| Original image | Power spectrum | Amplitude spectrum |
| 
| 
|
| Phase spectrum | High-pass filtering | Low-pass filtering |
For a more detailed analysis of Fourier transform and other examples of 2D image spectra and filtering, see introductory materials prepared by Dr. John M. Brayer ( Professor Emeritus, Department of Computer Science, University of New Mexico, Albuquerque, New Mexico, USA).
Fourier theory assumes that not only the Fourier spectrum is periodic but also
the input DFT data array is a single period of an infinite image repeating itself
infinitely in both directions:

| 
| 
|
| After applying the Hanning window | Truncated log-amplitude spectrum: λ = 352.8 | Phase spectrum |
Computation of a single value of F(u,v) involves a summation over all image pixels, i.e. O(N2) operations if the image dimensions are N×N (recall the Big-Oh notation from COMPSCI 220). Thus, the overall complexity of a DFT calculating the spectrum with N2 values of F(u,v) is O(N4). Such algorithm is impractical: e.g. more than one hour or 12 days for the DFT of a 256×256 or 1024×1024 image, respectively, assuming one microsecond per multiplication of a complex number.
Due to the separability of the DFT, a 1D DFT can be performed along each image row to form an intermediate N×N array. Then a 1D DFT is performed down each column of this array in order to produce the desired N×N array of the values of F(u,v). In such a way the complexity of a 2D DFT is reduced from O(N4) to O(N3). But the cubic complexity is still too high to make the algorithm practicable.
Fortunately, there exists a fast Fourier transform (FFT) algorithm that computes a 1D Fourier transform for N points in only O(N log N) operations which makes FFT a practical and important operation on computers. The 1D FFT speeds up calculations due to a possibility to represent a Fourier transform of length N being a power of two in a recursive form, namely, as the sum of two Fourier transforms of length N/2. The recursion ends at the point of computing simple transforms of length 2. Then the overall complexity of this 1D FFT is proportional to N log2N, i.e. O(N log N) compared with O(N2) for a directly calculated 1D DFT. Therefore the complexity of the separable 2D FFT becomes O(N2 log N). For a 512×512 image, a 2D FFT is roughly 30,000 times faster than direct DFT.
An example of the 1D FFT program will highlight the simplicity of this recursive computation. The classic 2D FFT requires that both image dimensions are powers of two. There exist more complex FFT algorithms that allow for less restricted dimensions. Otherwise the image can be either cropped or padded out with zero pixel values to the appropriate dimensions. The former approach discards data and may distort the spectrum but reduces processing time, while the latter increases time but does not affect the spectrum.
Filtering in the spatial domain is performed by convolution with an appropriate kernel. This operation impacts spatial frequencies but it is difficult to quantify this impact in the spatial domain. The spectral (frequency) domain is more natural to specify these effects; also filtering in the spectral domain is computationally simpler because convolution in the spatial domain is replaced with the point-to-point multiplication of the complex image spectrum by a filter transfer function.
Let F, H, and G denote the spectrum
of the image f, the filter transfer function (i.e. the spectrum of the
convolution kernel h), and the spectrum of the filtered image g,
respectively. Then the convolution theorem states that
f∗h ⇔ G(u,v) = F(u,v)H(u,v) (the derivation takes into account that
the image is infinite and periodic with the period N in the both directions;
the sign "⇔" indicates a Fourier transform pair such
that each its side is converted into the opposite one by a Fourier transform, i.e.
the left-to-right forward and right-to-left inverse transforms):
Convolving an image with a certain kernel has the same effect on that image as multiplying the spectrum of that image by the Fourier transform of the kernel. Therefore, linear filtering can always be performed either in the spatial or the spectral domains.
A low pass filtering suppresses high
frequency components and produces smoothed images. An ideal sharp cut-off filter
simply blocks all frequencies at distances larger than a fixed
filter radius r0 from the centre (0,0) of the spectrum:
A high pass filtering suppresses low frequency components and
produces images with enhanced edges. An ideal high pass filter suppresses
all frequencies up to the cutoff one and does not change frequencies beyond
this border:
A band pass filtering preserves a certain range of frequencies and suppress all others. Conversely, a band stop filtering suppresses a range of frequencies and preserves all other frequencies. For example, a band stop filter may combine a low pass filter of radius rlow and a high pass filter of radius rhigh, with rlow > rhigh. The transfer function of a Butterworth band stop filter with radius r0 = (rlow + rhigh)/2 and the band width Δ = rhigh − rlow is specified as Hs = 1 / (1 + [Δr(u,v)/(r2(u,v) − r02)]2n) where r(u,v) = [u2 + v2]1/2. The corresponding band pass filter is Hp = 1 − Hs. Even more versatile filtering is produced by selective editing of specific frequencies, in particular, the removal of periodic sinusoidal noise by suppressing narrow spikes in the spectrum.
Return to the local table of contents
Additive random noise caused by an imaging device is not the only source of
image degradation. For example, image blurring might be induced by the poor lens focusing, object
movements, and / or atmospheric turbulence. A conventional model of the degraded image
assumes that a perfect image f is blurred by filtering with a certain convolution
kernel h and further corrupted by the
addition of noise ε:

The way to inverting the convolution is clearer in the spectral domain: in accord with
the convolution theorem, the spectra of the perfect and degraded images, noise spectrum E,
and DFT of the PSF, called the modulation transfer function (MTF) relate as follows:


A more theoretically justified solution is the Wiener filtering that minimises
the expected squared error between the restored and perfect images. A simplified Wiener
filter is as follows:
Return to the local table of contents
These lecture notes follow Chapter 8 "The Frequency Domain" of the textbook