Synthetic Stereo Image Data for Algorithm Evaluation
On this page you can download images and ground truth of a virtual stereo camera mounted on a vehicle
that drives trough a city-like environment. This data was created in 2006 with a prototype of the TNO MARS/PRESCAN vehicle sensor simulator.
Download the original colour stereo images.
These archives contain the original colour stereo images without any noise and distortions.
They have been compressed into three ZIP archives. The images themselves are in the TIFF format. See the two images below for an example.


- Stereo images 0 until 100: OrigImages0tm100.zip (64.5 MB).
- Stereo images 101 until 201: OrigImages101tm201.zip (68.2 MB).
- Stereo images 202 until 325: OrigImages202tm325.zip (78.2 MB).
Download the disparity ground truth and pixel classes.
The disparity images have been stored in binary files and come with routines in Matlab and C to read them.
Several pixel class images are included to describe to which classes pixels belong; foreground, background, road, sky or non-occluded.
They are stored in images are stored in Portable Gray Map (PGM) format.
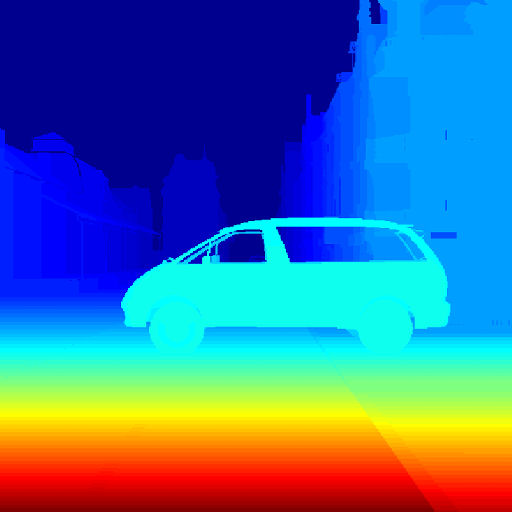
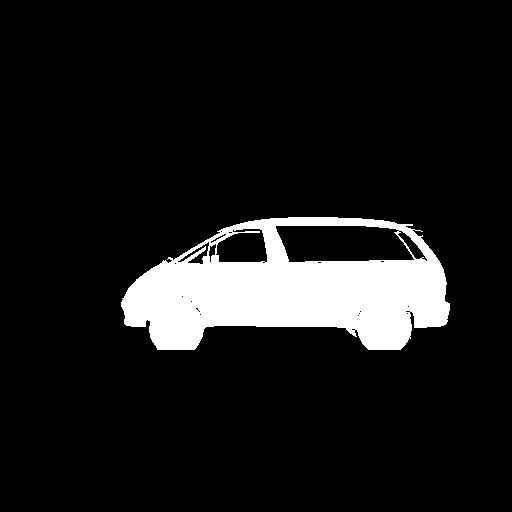
- Disparity ground truth and pixel class data: GroundTruth.zip (25.6 MB).
Download the distorted stereo images with noise influences.
These are stereo images with added distortions and noise influences for enhanced realism.
The images are stored in Portable Gray Map (PGM) format.


- Distorted and noisy stereo images: DistortedStereoImages.zip (108.0 MB).
For more information please refer to the paper:
W. van der Mark, D.M. Gavrila, ``Real-Time Dense Stereo for Intelligent Vehicles''. IEEE Transactions on Intelligent Transportation Systems, 7 (1), pp 38-50, 2006, (doi 10.1109/TITS.2006.869625).